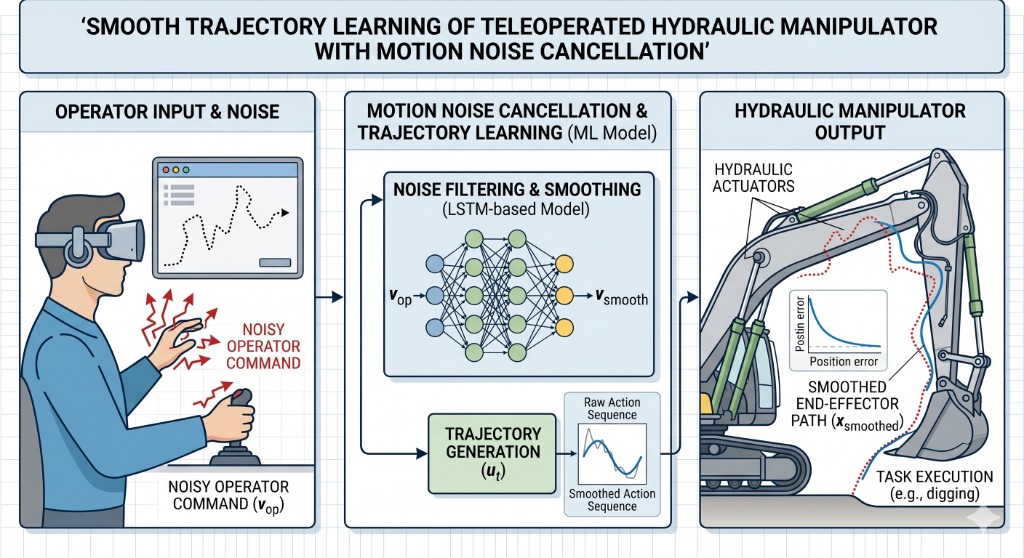
Hydraulic Manipulation and Shared Control
Heavy-duty hydraulic teleoperation platform
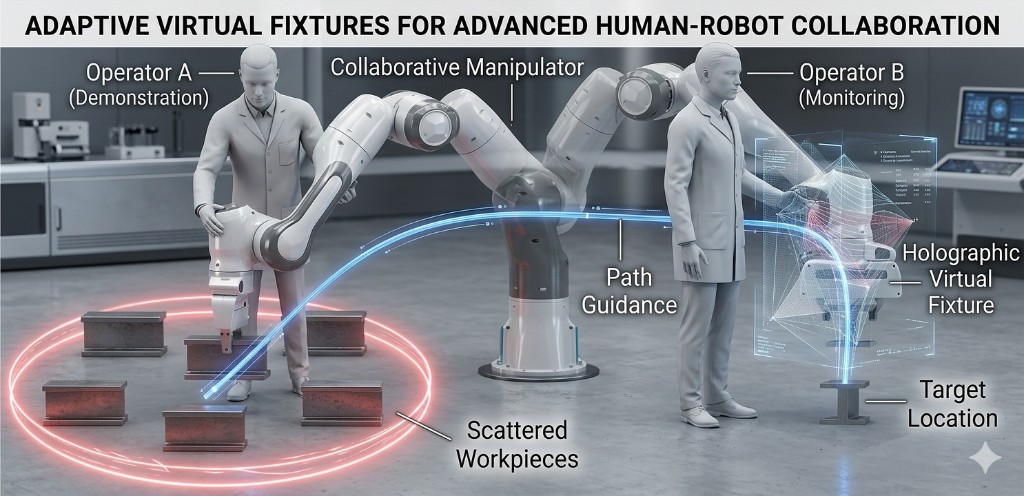
Since 2018, I worked on a hydraulic manipulator platform from its early structural design stage through electrical control, low-level servo tuning, kinematics, teleoperation data collection, and shared-control research. The platform later evolved into a dual-arm heavy-duty hydraulic robot deployed at the State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University.
Electrical and control system
Independently designed, selected, integrated, and debugged the electrical control stack for hydraulic actuation.
Hydraulic servo tuning
Tuned low-level PID loops and controller parameters across valves, sensors, and hydraulic modules.
Kinematics and teleoperation
Implemented forward/inverse kinematics and connected the teleoperation data acquisition pipeline.
Shared-control research
Proposed shared control to improve teleoperation efficiency and safety while reducing operator cognitive load.
Unlike modern electric manipulators, which often rely on highly integrated joint modules with built-in sensing, power electronics, communication, and low-level control interfaces, hydraulic manipulators require system-level integration across the entire actuation chain. Sensors, servo valves, hydraulic power supplies, electronic controllers, and servo loops must be co-designed and carefully tuned, making the final robot behavior a result of the coupled dynamics of the whole hydraulic system rather than an encapsulated joint module.